底盘¶
基础概念¶
FRC 机器人中的底盘主要由金属构件支撑,分为两种:直轮底盘和全向底盘。
直轮底盘(官底)¶
直轮底盘(Train Drive)是指底盘上的轮胎方向不会改变,通过左右两侧轮胎速度差,或麦克纳姆轮的几何转动来完成转向。这样的底盘可以通过履带坦克的例子来类比。
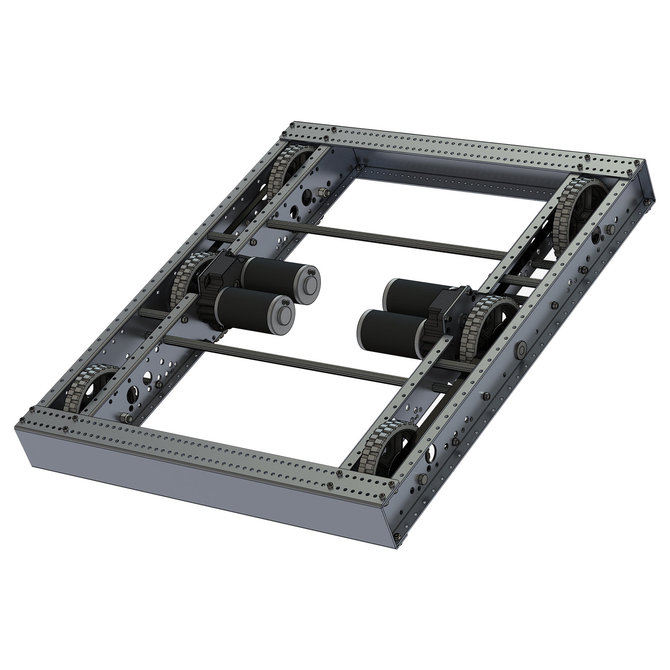
Source: AndyMark1. 上图是 AndyMark 公司提供的直轮底盘,由于该公司是 FIRST 官方所声明的赞助商,直轮底盘亦被称之为「官底」,即“官方底盘”。
直轮底盘在2020年及以前应用甚广,如 118、971 等外国强队都在官底的设计理念之上更新了齿轮箱、轮组,从而达到更佳的效果。以下列出部分轮组升级产品。


Source: REV Robotics2. 上图分别是 Omni 万向轮、充气高摩擦力橡胶轮,他们相较于官底配置有了极大性能提升。
此外,部分队伍还采用了麦克纳姆轮(Mecanum wheels)来实现类似效果。麦轮的优势在于节省传动空间,且机动性更高。而劣势在于麦轮抓地力不可观,在 2023 赛季中难以爬上斜坡,因此其应用并不广泛。

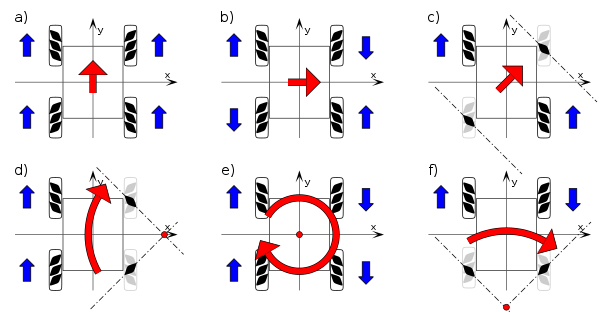
Source: Wikipedia3. 上图分别是典型的麦轮底盘设计与麦轮驱动原理图。极高的转向灵活性必然带来抓地力的牺牲。
万向底盘¶
万向底盘(Swerve Drive Train)是通过改变底盘轮胎的方向来改变方向的底盘。我们通过实例图片来理解其原理。
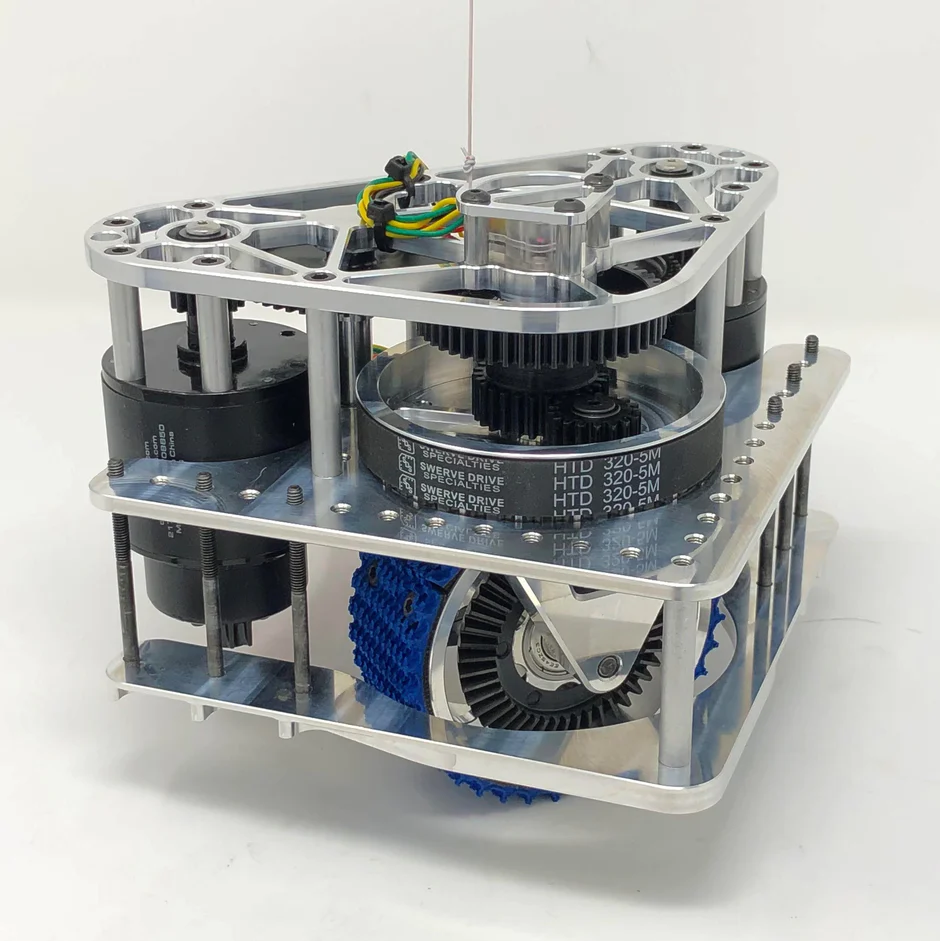
Source: Swerve Drive Specialties4. 上图是较新版本的 Swerve 全向底盘部件。一个底盘共有 4 个完全相同的 Swerve 模块,本图仅展示了其一作展示之用。
一个 Swerve 模块通常包含两个电机(motors),上图展示的是 Falcon 电机,现实中亦可使用 775 电机(不推荐,原因是 775 的峰值负荷较低)。其中一个电机带动轮胎滚动,另一个负责转向。由此,Swerve 实现了万向功能。
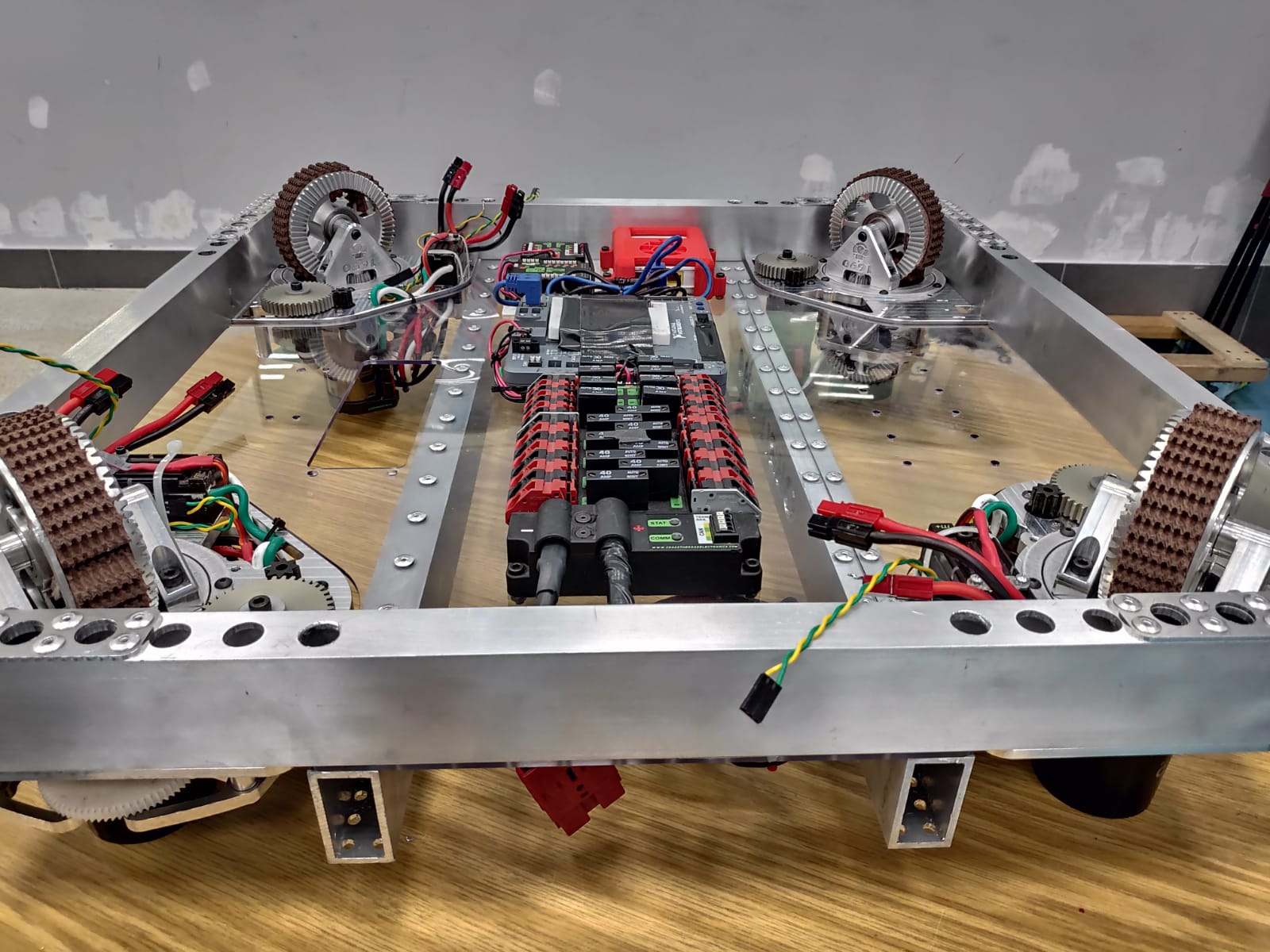
Source: Chief Delphi / Team 1690 Orbit5. 上图是 Swerve 模块完全安装在底盘铝方管上时的样子。