控制程序¶
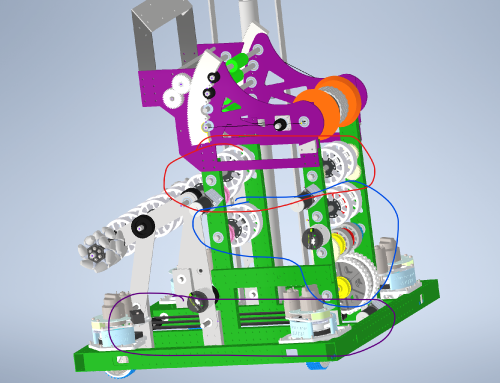
球路的自动供球由2个输入,2个输出组成,blocker由shooter系统单独控制,不算在自动供球系统中。
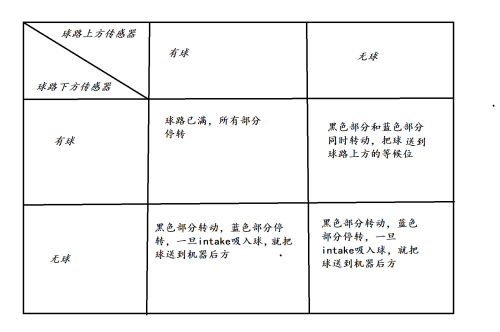
尽管直接设计球路的供球逻辑可能没有那么简单,但是考虑到只有两个 DigitalInput ,我们可以采取直接枚举的方式来撰写控制逻辑。
以下是控制代码节选(UpFront 和 UpBack 都是蓝色部分的控制,只不过这个部分有两个不同的电机):
AutofeedCommand:
if(!RobotContainer.m_Hopper.NoBallOnBottom()&&!RobotContainer.m_Hopper.NoBallOnTop())
{
RobotContainer.m_Hopper.SetBottomOutput(0);
RobotContainer.m_Hopper.SetUpFrontOutput(0);
RobotContainer.m_Hopper.SetUpBackOutput(0);
}
else if(RobotContainer.m_Hopper.NoBallOnBottom()&&!RobotContainer.m_Hopper.NoBallOnTop())
{
RobotContainer.m_Hopper.SetBottomOutput(HopperConstants.HopperOutput);
RobotContainer.m_Hopper.SetUpBackOutput(0);
RobotContainer.m_Hopper.SetUpFrontOutput(0);
}
else if(!RobotContainer.m_Hopper.NoBallOnBottom()&&RobotContainer.m_Hopper.NoBallOnTop())
{
RobotContainer.m_Hopper.SetBottomOutput(HopperConstants.HopperOutput);
RobotContainer.m_Hopper.SetUpFrontOutput(HopperConstants.HopperOutput);
RobotContainer.m_Hopper.SetUpBackOutput(HopperConstants.HopperOutput);
}
else
{
RobotContainer.m_Hopper.SetBottomOutput(HopperConstants.HopperOutput);
RobotContainer.m_Hopper.SetUpFrontOutput(0);
RobotContainer.m_Hopper.SetUpBackOutput(0);
}
值得一提的是,这种控制逻辑下,在没有球的情况下,底部的同步带会一直维持高速旋转,会浪费大量电池电量并导致电压下降,可以通过在球路前部新增传感器来优化球路的控制逻辑。
还有一个比较坑的地方, roborio 的 digitalinput 逻辑非常的诡异,当有电压输入的时候返回 false ,没有电压输入的时候会返回 true ,与 arduino 的逻辑恰恰相反,各位编写程序的时候要额外注意。